

PISO-CAN400U-T
4-Port Isolated Protection Universal PCI CAN Card with 5-Pin Screw Terminal Connector

Features
The CAN (Controller Area Network) is a serial communication protocol, and efficiently supports distributed real-time control with a very high level of security. It is an especially suit for networking "intelligent" devices as well as sensors and actuators within a system or sub-system. In CAN networks, there is no addressing of subscribers or stations in the conventional sense, but instead prioritized messages are transmitted. As standalone CAN controller, PISO-CAN400/CAN200 can represents an economic solution of an active CAN board. It has two or four independent CAN bus communication ports with 5-pin screw terminal connector or 9-pin D-sub connector, and has the ability to cover a wide range of CAN applications. Besides, PISO-CAN400/CAN200 uses the new CAN controller Phillips SJA1000T and transceiver 82C250/251, which provide bus arbitration, error detection with auto correction and re-transmission function. It can be installed in a 5V PCI slot and supported truly “Plug & play”.
Applications
- CAN bus communication application
- DeviceNet, CANopen, CAN J1939, SDS(System Wide Network) protocol application
- Control System, Building Automation, Factory Automation, Distributed data acquisition
Solution for CANbus Power Meter
The PM-213x-CAN series power meter provides the CAN bus interface for users to easily gather the real-time power consumption information in their CAN applications. The PM-213x-CAN provides the Auto-Response mode which responses messages at regular intervals automatically. It makes the communication more efficient when collecting a lot of remote power information. The polling mode offers the precise information of every step required by the monitors. In addition, the PM-213x-CAN also owns the arbitration mechanism which can avoid data collision and error detection.
Features of CAN bus power meter:
- NXP TJA1042 CAN transceiver
- Follow CiA CAN 2.0B specification
- Support Auto-Response mode and Polling mode
- Support baud rate 125 kbps, 250 kbps and 500 kbps
- Support up to 255 nodes on the CAN network
- 2500 Vrms isolation on CAN port
- 4 kV ESD protection on CAN port
- CAN bus provides better capability in noise suppression
- Support arbitration mechanism to avoid collision
- Support error detection and error correction on CAN bus
Features
-
Four independent CAN bus 2.0A/2.0B communication ports
-
Compatible with CAN specification 2.0 parts A and B
-
On-board optical isolation protection
-
Programmable transfer rate up to 1 Mbps
-
2500 Vrms photo couple isolation on the CAN bus
-
Jumper select 120 Ω terminator resistor for each port
-
Direct memory mapping to the CAN controllers
-
33MHz 32bit 5V PCI bus (V2.1) plug and play
[PISO-CAN400-D/T only]
- PCI card, supports 5V PCI bus
[PISO-CAN400U-D/T only]
- Universal PCI card, supports both 5V and 3.3V PCI bus
Note: We have verified to drive 100 CAN nodes at the same time via one CAN port of PISO-CAN400
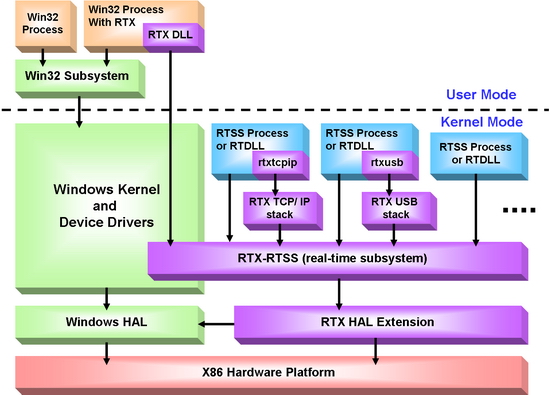
RTX Driver
In order to satisfy the users to apply the RTX system, ICPDAS provides the RTX driver for PISO-CAN series CAN card. If users want to combine the CAN communication interface in their time-critical system, the RTX driver of the PISO-CAN series CAN cards can help them to do this easily and quickly. Furthermore, the name and parameters of the APIs in the RTX driver are the same as in the Windows driver. Users don’t need to pay more efforts to study how to use the APIs of the RTX driver if they have used the Windows driver before. The RTX driver increases the additional worth of the PISO-CAN series CAN cards, and satisfies the users to get the highly real-time system. By owing to the feature of high price performance and highly real-time, PISO-CAN series CAN cards will be applied in more wide and more variant CAN applications.
Features:
- The name and parameters of the APIs in RTX driver are the same as them in the Windows driver. Users don’t need to learn the new usage if they have used the PISO-CAN series CAN card before
- If the PISO-CAN series CAN card can get the independent IRQ, it supports interrupt function
- Direct I/O control and highly real-time feature
- Support Windows2000 SP4, and Windows XP SP2 OS
- Support RTX version 8.0 or later
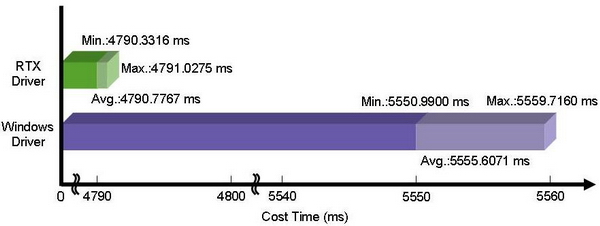
Real-time Test:
- Platform: Windows XP SP2+PEX-CAN200i
- Device: I-7186EXD-CAN with MiniOS7 (single tasking OS)
- Send and receive 10000 CAN 2.0B 8-byte messages. Repeat this procedure for 10 times
SocketCAN Driver
The SocketCAN is based on the Linux operating system, and it contains the implementation interface of the network stack and the hardware driver. The hardware manufacturers program the hardware driver for the SocketCAN, and the network stack provides the standard BSD Socket APIs for users. Therefore, from the users’ point of view, they can easily and quickly program their applications without being familiar with the various APIs of the different hardware interface through the SocketCAN network stack.
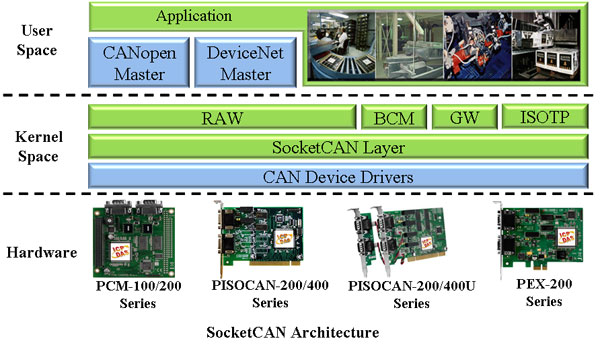
We have provided the SocketCAN drivers for several kinds of CAN interface cards. Users can implement their SocketCAN-based application on the Linux platform by using these cards. Besides, we also support static library of CANopen/DeviceNet master on x86 hardware platform. It can help users communicate with CANopen/DeviceNet slaves more easily.
Features:
- Support Linux kernel version 2.6.31~2.6.34 (x86 hardware platform only)
- Provide CANopen/DeviceNet master static library
- Standard interface for SocketCAN package. Users can use extended BSD socket APIs, you can program the CAN application as building a socket program
- Support Virtual CAN interface. Users can map several virtual CAN port into one physical CAN port. Each virtual CAN port has its own socket. Through these sockets, users can build the multi-thread application more easily
- Provide the RAW socket, CANopen master and DeviceNet master demos
- Good price-performance for economical applications
Note:
Hardware platform:Intel(R) Core(TM)2 CPU 6320 @ 1.86GHz, DDR2 667MHz 1.5GB
Software platform:Kernel-2.6.32, Distro- Debian GNU/Linux 5.0
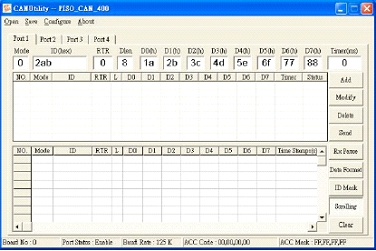
Utility
- Can be a CAN system monitor tool with CAN cards
- It is a good tool to test CAN system
- Send/Receive/Record CAN messages
- Provide cyclic transmission function
- Record the CAN messages with filtered ID and time stamp
- Support: Win98/Me/2000/XP-32bit/7-32bit/7-64bit (not for Win 7 Ultimate-64bit)
ActiveX Tool
In order to use PISO-CAN200/400 easier, we provide a PISOCANX ActiveX component (OCX).
It is a useful element to develop the PISO-CAN200/400 application on different program development platform, and it also help users to reduce their development period.
Specially, users can use this in their SCADA softwares which support ActiveX technology. It would be possible to use SCADA software to control or monitor CAN devices. If users want to get PISOCANX, it will be found after installing the PISO-CAN200/400 driver with 1.16 version or later.
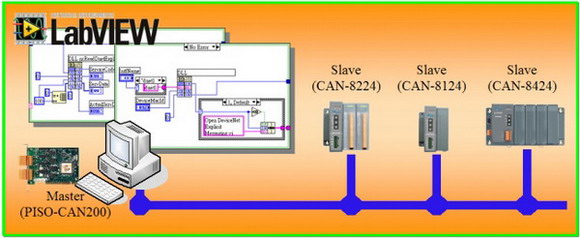
LabVIEW Tool
In order to apply the PISO-CAN200/400 to CAN network with NI LabVIEW, we provides a LabVIEW 7/7.1 toolkit for the purpose. It is a useful tool to develop the CAN-relative application in NI LabVIEW environment by using PISO-CAN200/400. It is easy to use and can help user to rapidly reduce their program development cycle. If users want to develop a LabVIEW industrial application with CAN network, the LabVIEW CAN driver is very helpful.
CAN LabVIEW Tool Features:
- Support extension arbitration id
- Support debug receive mode
- Start byte of output
- Support LabVIEW 7/7.1
- Scaling range to select
- Two languages, German and English
- Selectable data rates (baud): 10K, 20K, 50K, 125K, 250K, 500K, 800K, 1M, and user defined.
DASYLab Tool
In order to easy to use the PISO-CAN200/400 to CAN network for user. We provides a DASYLab version 8.0 toolkit for the purpose. It is a useful tool to develop the CAN-relative application in DASYLab environment by using PISO-CAN200/400. It can help user to rapidly reduce their program development cycle. If users want to develop a DASYLab industrial application with CAN network, the DASYLab CAN driver is very helpful.
CAN DASYLab Tool Features:
- Support extension arbitration id
- Support maximum 64 CAN ports
- Start byte of output
- Scaling range to select
- Sample rate from 50 ~ 5000 Hz
- Two languages, German and English
- Selectable data rates (baud): 10K, 20K, 50K, 125K, 250K, 500K, 800K, 1M, and user defined
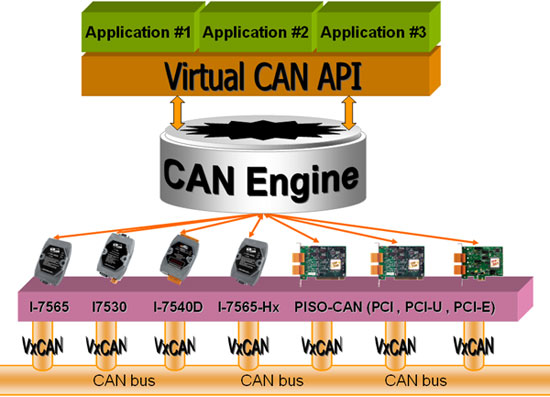
Virtual CAN
There are various communication interfaces among the CAN devices like PCI CAN board, Ethernet series and RS-232 series CAN module. According to different purpose of users’ projects, the users maybe need to choice different CAN products. Because of this situation, the programmer should develop different communication program to handle different CAN device. For example, the user should develop “Socket Client” to communicate with I-7540. When using I-7530, the users need “UART” technique to communicate with it. Nowadays, ICP DAS develop the Virtual CAN technique. The Virtual CAN driver is the excellent tool for users. It transforms whole CAN devices into Virtual CAN port. And then it generates Virtual CAN port like “VxCAN 1” or “VxCAN 2”. The users could send and receive CAN message by appointing the Virtual CAN port number. The users don't need to care about what kind of CAN device which is used.
CanOpen Tools
In order to apply the CANopen protocol on the PISO-CAN200/400 easily, we provides two CANopen application Tools, which are CANopen library and CANopen diagnosis application tool. If users want to develop an industrial application with CANopen protocol, the CANopen library is very helpful to be applied with the PISO-CAN200/400 as the CANopen devices with the features of CANopen protocol. Besides, if the monitor and diagnosis of CANopen message on the CAN network is considered, the CANopen diagnostic application tool can be used to achieve this purpose.
CANopen Application Tool Features:
- Follow DS301 version 4.02
- Auto detecting CANopen slave devices
- IO monitor
- Dynamic PDO
- NMT master
- Support the Guarding and Heart beat protocol and SYNC message.
- Selectable data rates (baud): 10K, 20K, 50K, 125K, 250K, 500K, 800K, 1M
DeviceNet Tools
DeviceNet is a low level network that provides connections between simple industrial devices (sensors, actuators) and higher level devices (controllers). It allows direct peer to peer data exchange between nodes in an organized and, if necessary, deterministic manner. We provides DeviceNet library for users to develop the specific DeviceNet application by PISO-CAN200/400. In addition, we also provide the DeviceNet diagnosis application tool to monitor and diagnose the DeviceNet message through CAN network. It provides the DeviceNet communication protocol interface to control and analysis the DeviceNet slaves.
DevcieNet Application Tool Features
- Auto detecting DeviceNet slave devices
- IO monitor
- Message monitor & diagnosis
- Support UCMM capable devices
- Support the Predefined Master/Slave connection set
- Selectable data rates (baud): 125K, 250K, 500K
DevcieNet Master X-Server Features
More Info...
DeviceNet for LABVIEW Application Tool
In order to implement DeviceNet communication by NI LabVIEW software, ICPDAS provides a set of DeviceNet component for LabVIEW- “ICPDAS-DNET”. We also have the configuration utility to configure the ICPDAS’s DeviceNet hardware in your PC. The users not only operate easily and develop application rapidly, but also reduce the complexity of applications. The users can communicate with the remote DeviceNet devices in a few simple steps and need not to know about the detail of the DeviceNet protocol. It is a very useful tool to develop the DeviceNet application in NI LabVIEW environment by using ICPDAS-DNET. After finishing install the tool, we offer many basic and advance demo programs for users to reduce the development time. If you are new engineer to develop DeviceNet application, you can refer to the demo programs first. It is the best tool to develop various distributed systems and other industrial application software on DeviceNet network.

DevcieNet for LabVIEW software Features
NI LabVIEW software Support
- NI LabVIEW Software V7.0 or newer
- NI-DNET DeviceNet driver V1.5 or newer
Linux Distributions
Linux kernel version of distributions |
|
Linux kernel Distribution |
2.6.37 |
Debian GUN/Linux |
4.0 |
Fedora Core |
2/3/4/5/6/7/8 |
Mandrake(Mandriva) |
10.0/10.1/10.2 |
Red Hat Enterprise |
4/5 |
Ubuntu |
7.04 |
SUSE |
9.1/9.2/9.3/10.0 |
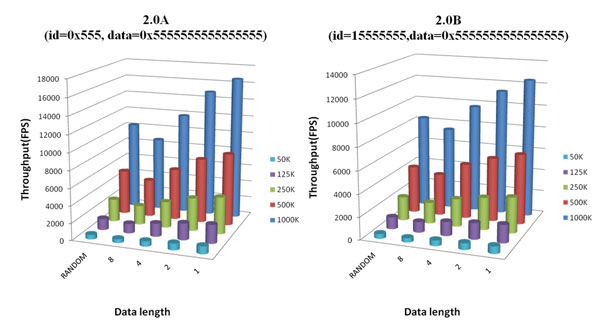
Performance Test
Test development:
OS:Windows XP SP 3
CPU:Intel Core 2 Duo 2.00 GHz
RAM:512 MB
Baud Rate(bps) |
CAN 2.0 A |
CAN 2.0 B |
Frame per sec. |
Frame per sec. |
|
1000 k |
7493 |
6387 |
800 k |
6185 |
5249 |
500 k |
4088 |
3463 |
250 k |
2134 |
1808 |
125 k |
1096 |
924 |
50 k |
438 |
370 |
20 k |
175 |
148 |
10 k |
88 |
74 |
Note:The test result is the average value of receiving 100000 CAN messages.
Specifications
Model Name |
PISO-CAN400U-D |
PISO-CAN400U-T |
Bus Interface |
||
Type |
Universal PCI, 3.3 V and 5 V, 33 MHz, 32-bit, plug and play |
|
CAN Interface |
||
Controller |
NXP SJA1000T with 16 MHz clock |
|
Transceiver |
NXP 82C250 |
|
Channel number |
4 |
|
Connector |
9-pin male D-Sub |
5-pin screwed terminal block |
Baud Rate (bps) |
10 k, 20 k, 50 k, 125 k, 250 k, 500 k, 800 k, 1 M (allow user-defined baud rate) |
|
Terminator Resistor |
Jumper for 120 Ω terminator resistor |
|
Power |
||
Power Consumption |
300 mA @ 5 V |
|
Software |
||
Driver |
Windows 98/ME/NT/2K/XP/7, Linux 2.6.37, LabView, DASYLab |
|
Library |
VB 6.0, VC++ 6.0, BCB 6.0, Delphi 4.0 |
|
Mechanism |
||
Dimensions |
126mm x 22mm x 85mm (W x L x H) |
|
Environment |
||
Operating Temp. |
0 ~ 60 ℃ |
|
Storage Temp. |
-20 ~ 70 ℃ |
|
Humidity |
5 ~ 85% RH, non-condensing |
|
References and Support
Customer Reviews (0)
Be the first to leave a review.



...
$889.00 Each
Quantity added:

