
PISO-CM100U-T
One Standalone Intelligent CAN Communication Board with terminal connector
Features
The CAN (Controller Area Network) is a serial communication protocol and efficiently supports distributed real-time control with a very high level of security. It is suited for networking "intelligent" devices as well as sensors and actuators within a system or sub-system. In CAN networks, there is no addressing of subscribers or stations in the conventional sense; instead prioritized messages are transmitted.
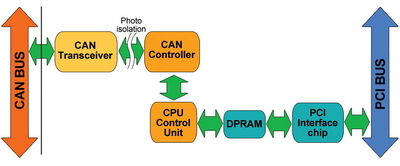
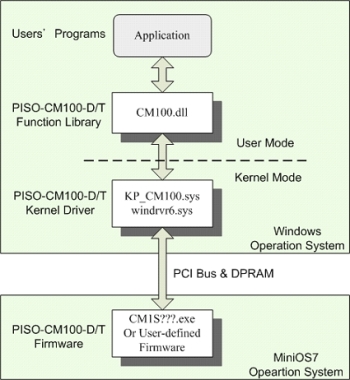
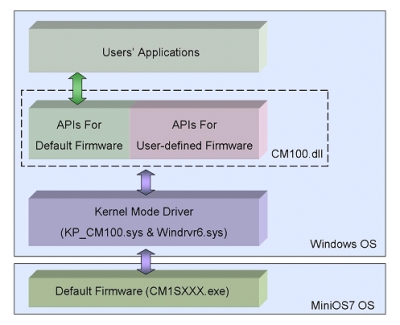
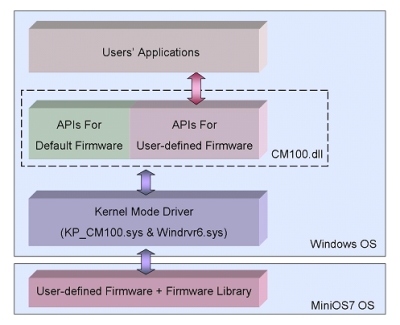
ICP DAS provides an open architecture platform for CAN bus-PISO CM100. The PISO-CM100 represents a very powerful and economic solution of an active CAN board with one CAN channels, covering a wide range of CAN applications. The 16-bit on-board microcontroller allows, among many other features, the filtering, preprocessing, and storage (with timestamp) of CAN messages as well as the real-time transmission of CAN messages. PISO-CM100 also uses the new Phillips SJA1000T and Transceiver 82C250/251, which provide bus arbitration and error detection with auto correction and a re-transmission function. With the powerful microcontroller, this card can be made for one CAN controller without losing data, even in systems with a high bus load. It is equipped with integrated intelligence functions, so PIO-CM100 makes it possible to preprocess CAN data streams; thus relieving the PC of a considerable burden. As a result, real-time requirements on PC applications are drastically reduced. It can be installed in a slot of 5V 32-bits PCI bus and supports true “Plug & play” technology.
Users can develop their own CAN applications by using the PISO-CM100 library. When the PISO-CM100 is active, the data exchange between users’ applications and can bus firmware is performed via the memory mapping method of the PISO-CM100.
- Microprocessor inside with 80186, 80MHz
- 82C250 CAN transceiver
- SJA1000T CAN controller
- Support both CAN 2.0A and CAN 2.0B
- Timestamp with at least ±1ms precision
- DIP switch to select board number
- Dual port RAM communication mechanism
- RTC (real time clock) inside
- Applications:
- DeviceNet
- CANopen
- CAN J1939
- SDS (System Wide Network) protocol applications
- CAN bus communication application.
- Industry automation
- Industrial Machinery
- Building Automation
- Food & Beverage
- Semiconductor Fabrication
- Control systems
Software Utility Features
- Windows Drivers:
- Development Toolkit for Windows 98/Me/NT/2000/XP
- Demos for VC++, VB and BCB
- Windows Tools
- CANUility: Includes send/receive CAN messages, message ID filter, data format transformation, messages recoder and firmware update functions
- Debug tool
- MiniOS7 Tools:
- C/C++ Library for RTC, EEPROM, LED, DPRAM, CAN controller and timers control functions
- Demos for TC, TC++, BC and BC++
- Architecture:
- Performance Test
- Test development
- OS:Windows XP SP 3
- CPU:Intel Core 2 Duo 2.00 GHz
- RAM:512 MB
Baud Rate(bps) |
CAN 2.0 A |
CAN 2.0 B |
Frame per sec. |
Frame per sec. |
|
1000 k |
7502 |
6589 |
800 k |
6188 |
5258 |
500 k |
4097 |
3451 |
250 k |
2140 |
1801 |
125 k |
1098 |
920 |
50 k |
440 |
371 |
20 k |
176 |
148 |
10 k |
88 |
74 |
| Note:The test result is the average value of receiving 100000 CAN messages. | ||
Specifications
Model |
PISO-CM100-D |
PISO-CM100-T |
PISO-CM100U-D |
PISO-CM100U-T |
Interface |
33MHz 32bit 5V PCI bus (V2.1) plug and play technology |
Universal PCI supports both 5V and 3.3V PCI bus |
||
CPU |
Microprocessor inside with 80186 80MHz |
|||
CAN Port Channels |
1 |
|||
CAN Transceiver |
Phillips 82C250 |
|||
CAN Controller |
Phillips SJA1000T with 16MHz |
|||
CAN Connector |
9-pin D-sub female connector |
5-pin screw terminal connector |
9-pin D-sub female connector |
5-pin screw terminal connector |
Support Protocol |
CAN 2.0A/2.0B |
|||
Isolation |
2500 Vrms on the CAN side |
|||
Board Number |
Selectable board number by DIP switch |
|||
Terminator Resistor |
Selectable 120Ω terminator resistor by jumper |
|||
NVRAM |
31 bytes |
|||
DPRAM |
8K bytes |
|||
Flash/SRAM/EEPROM |
512K/512K/2K bytes |
|||
Driver |
Provide Windows 98/ME/NT/2K/XP |
|||
Baud Rate Configure |
5K, 10K, 20K, 25K, 50K, 100K, 125K, 200K, 250K, 500K, 800K and 1Mbps |
|||
Timestamp |
Timestamp of CAN message with at least ±1ms precision |
|||
Transmit Buffer |
256 records CAN message transmission buffer size |
|||
Receive Buffer |
2048 records CAN message reception buffer size |
|||
RTC |
Real time clock inside |
|||
LEDs |
Rx/Tx LED: Rx/Tx data, Err LED: CAN error occur |
|||
Power Consumption |
+ 5V@ 300 mA |
|||
Operating Temp. |
0℃~60℃ |
|||
Storage Temp. |
-20℃~80℃ |
|||
Humidity |
0~90% non-condensing |
|||
Dimensions |
138mm x 127mm (W x H) |
|||
References and Support
Customer Reviews (0)
Be the first to leave a review.

PISO-CM100U-T
One Standalone Intelligent CAN Communication Board with terminal connector
$649.00 Each
Quantity added: